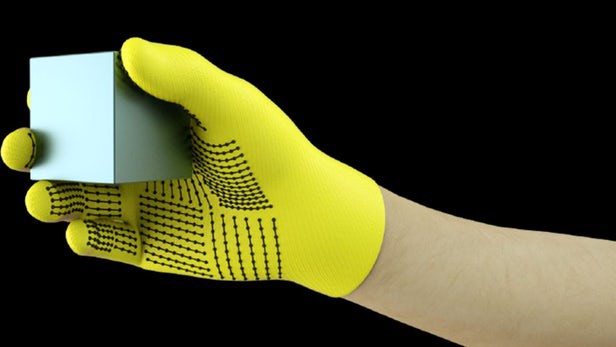
پژوهشگران دانشگاه MIT موفق به طراحی یک دستکش حسگر برای سیستم های هوش مصنوعی شده اند که به آن ها اجازه می دهد تا به خوبی بتوانند اشیاء را لمس و شناسایی کنند. نام این دستکش “دستکش لمسی مقیاس پذیر” یا به اختصار STAG می باشد که در ساخت آن از ۵۵۰ سنسور فشار استفاده شده است که اجازه هدایت بهتر دست های مصنوعی را به ما می دهد.
برای مثال اگر انسان ها گوشی یا عینک خود را در یک مکان تاریک قرار داده باشند می دانند که چگونه با حرکت ظریف دست خود آن جسم را پیدا کنند. این دقیقا همان چیزی است که مهندسان سال هاست به دنبال پیاده سازی آن بر روی ربات ها می باشند. اگر چنین چیزی بر روی یک ربات قرار گیرد، آن ربات می تواند در شرایط بسیار سخت نیز فعالیت کند که این أمر باعث بهبود و پیشرفت واکنش دست های مصنوعی می شود.
به گزارش سرویس اخبار فناوری و تکنولوژی تک نیوز به نقل از دانشگاه MIT امریکا، یکی از راه هایی که می توان فهمید که انسان ها چگونه می توانند با حس لامسه خود اشیاء را شناسایی کنند، جمع آوری اطلاعات است. اگر این اطلاعات جمع آوری شود و حجم این اطلاعات بالا باشد سپس می توان از یک سیستم هوش مصنوعی استفاده کرد و به شناخت دقیق ازینکه انسان چگونه می توانند اشیاء را شناسایی کنند یا وزن آن را به خوبی درک کنند رسید که درک این موارد برای یک ربات بسیار سخت است.
محققان MIT این اطلاعات را با استفاده از دستکش ارزان قیمت خود که دارای ۵۵۰ سنسور فشاری می باشد جمع آوری می کنند. این دستکش مستقیما به رایانه متصل است و داده ها را در ان جمع آوری می کند و اندازه گیری های فشار بصورت یک ویدیو “نقشه لمسی” در می آید و سپس توسط یک “شبکه عصبی پیچشی (Convolutional Neural Network)” این اطلاعات طبقه بندی می شوند و بر اساس الکوی فشاری به جسم مورد نظر تطابق داده می شوند.
در همین راستا تیم محقق توانست ۱۳۵۰۰۰ فریم ویدیویی را از ۲۶ اشیاء مشترک مانند قوطی نوشابه، قیچی، توپهای تنیس، قاشقها، قلم ها و لیوان ها جمع آوری کند. سپس شبکه عصبی با فریم های نیمه تصادفی به نقاط خاصی هماهنگ شد تا یک تصویر کامل از یک جسم ساخته شود – به طوری که یک فرد یک شی را با چرخاندن آن در دست خود مشخص می کند. با استفاده از تصاویر نیمه تصادفی، شبکه می تواند خوشه های مرتبط با تصاویر را بدهد که این أمر باعث می شود تا سیستم زمان زیادی را صرف داده های ناقص نکند.
دکتر Petr Kellnhofer از ازمایشگاه کامپیوتر و هوش مصنوعی MIT می گوید: “ما می خواهیم تغییرات بین فریم ها را به حداکثر برسانیم تا بهترین امکان ورود به شبکه را فراهم کنیم. تمام فریم ها در داخل یک خوشه واحد باید اثر مشابهی داشته باشند که راه های مشابهی را برای درک شیء نشان می دهند. نمونه برداری از خوشه های یک جسم باعث شبیه سازی و شناخت آن شیء می شود.”
این سیستم نه تنها می تواند اشیا را با دقت ۷۶ درصد شناسایی کند، بلکه همچنین به محققان کمک می کند تا بدانند چگونه دست ها آنها را کنترل می کنند. برای برآورد وزن با دقت حدود ۶۰ گرم، یک پایگاه داده جداگانه از ۱۱۶۰۰ فریم ساخته شد که شامل بلند کردن اشیاء توسط انگشتان و رها کردن آن ها می باشد. با اندازه گیری میزان فشار در دست پس از بلند جسم و مقایسه آن با زمانی که آن جسم رها شده است، وزن آن قابل اندازه گیری می باشد.
یکی دیگر از مزایای سیستم هزینه و حساسیت آن است. دستکش های مشابه هزاران دلار قیمت دارند و در ساخت آنها تنها از ۵۰ سنسور استفاده شده است در حالی که دستکش ساخت MIT از مواد در دسترس و ارزان ساخته شده است و حدود ۱۰ دلار قیمت دارد و در ساخت آن از ۵۵۰ سنسور فشاری استفاده شده است!